Race Report - The Dark Dart Dash
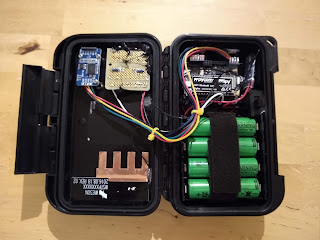
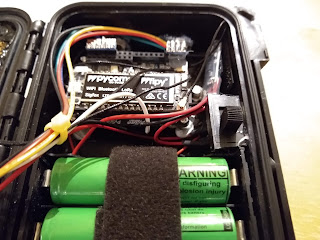
Saturday evening was the biggest test of the equipment so far. Two hundred plus entries, many waves, and four distances. It's probably fair to say I had a fair few nerves going into this. Not on the hardware side, I'd done enough tests on that to be confident, but how easy was the software going to be to use in the field (spoiler - not very). Here's the summary. Good things 100% reliability on hardware All chips read without mis-scans All data transferred correctly Problems ( and solutions ) - 4 chips were out of sequential order on the master reference sheet causing mixups - going to rescan everything Web-side software was too complex meaning too long to implement changes - modifying this (easy job) Used numerical, rather than plain text waves - will use plain text next time The UID strings do not look correct - this a technical issue. Whilst the UIDs are reported in byte strings and are correct (and unique). - going to recode to carry out bytearray to hex conversion